Gradient Vector Valued Function
이번 글에서는 $f: R^n \rightarrow R^m$형태의 함수의 gradient에 대해서 다룰 것이다.
- $f: R^n \rightarrow R^m
- $x = [x_1, x_2, \cdots, x_n]$
- $f_i: R^n \rightarrow R$
f(x)=⎣⎢⎢⎢⎢⎡f1(x)f2(x)⋮fm(x)⎦⎥⎥⎥⎥⎤∈Rm
Partial Derivative of Vector Valued Function
위의 함수에서 $x_i$에 대해 편미분을 구해보면 아래와 같이 전개된다.
∂xi∂f=⎣⎢⎢⎢⎢⎢⎡limh→0hf1([x1,⋯,xi+h,⋯,xn])−f(x)limh→0hf2([x1,⋯,xi+h,⋯,xn])−f(x)⋮limh→0hfm([x1,⋯,xi+h,⋯,xn])−f(x)⎦⎥⎥⎥⎥⎥⎤
이제, vector $x$에 대해 미분을 구해보자.
dxdf(x)=[∂x1∂f,∂x2∂f,⋯,∂xn∂f]
위의 수식처럼, row vector형태로 나온다. 이를 더 전개해보면, 각 element는 column vector의 형태이므로 matrix 형태가 된다.
dxdf(x)=[∂x1∂f,∂x2∂f,⋯,∂xn∂f]=⎣⎢⎢⎢⎢⎢⎡⎣⎢⎢⎢⎢⎢⎡limh→0hf1([x1+h,⋯,xn])−f(x)limh→0hf2([x1+h,⋯,xn])−f(x)⋮limh→0hfm([x1+h,⋯,xn])−f(x)⎦⎥⎥⎥⎥⎥⎤,⋯,⎣⎢⎢⎢⎢⎢⎡limh→0hf1([x1,⋯,xn+h])−f(x)limh→0hf2([x1,⋯,xn+h])−f(x)⋮limh→0hfm([x1,⋯,xn+h])−f(x)⎦⎥⎥⎥⎥⎥⎤⎦⎥⎥⎥⎥⎥⎤∈Rm×n
Definition: Jacobian
함수 $f: R^n \rightarrow R^m$의 모든 first-order partial derivative의 모음을 jacobian이라고 한다.
J=∇xf=dxdf(x)=[∂x1∂f,∂x2∂f,⋯,∂xn∂f]∈Rm×n
J(i,j)=xjfi
Jacobian: general way for identifying function.
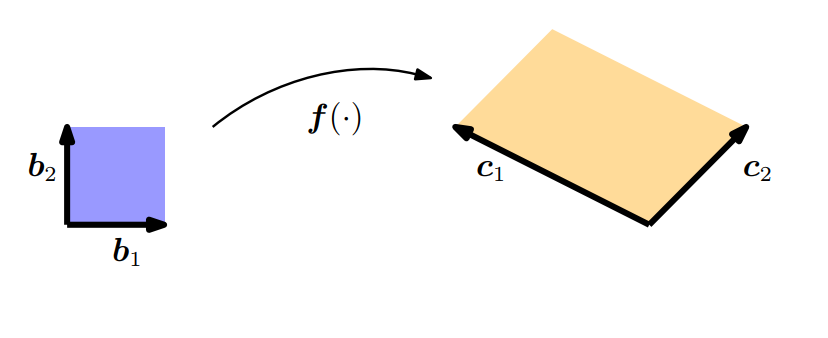
위와 같은 함수 f가 있다고 해보자. 각 $b_1, b_2$와 $c_1, c_2$는 아래와 같다.
- $b_1 = [1, 0] ^T, b_2 = [0, 1]^T$
- $c_1 = [-2, 1]^T, c_2 = [1, 1]^T$
domain 영역(파란색 부분) determinant는 아래와 같다.
det([1001])=1
Codomain 영역(주황색 부분)의 determinant는 아래와 같다.
det([−2111])=−3
따라서, volume의 차이를 보면, 파란색보다 주황색 영역이 3배 크다. 위와 같은 mappingd을 모른다고 가정하고 두 가지 접근법을 통해서 구해볼 것이다.
- linear algebra
- vector calculus
1. Linear algebra: basis change
위의 mapping은 basis $b$에서 basis $c$로 바뀐 것으로 해석할 수 있다. 따라서 linear transformation matrix는 아래와 같다.
J=[−2111]
위의 matrix를 바탕으로 아래와 같은 관계를 구할 수 있다.
Jb1=c1,Jb2=c2
그리고 $J$의 determinant는 $-3$으로 volume이 얼마나 늘었는지 알 수 있다.
2. vector calculus: partial derivative
linear algebra의 방법은 linear transformation에서만 가능하다는 한계를 가진다. 여기서 조금 더 general하게 접근할 수 있는 방법은 partial derivative를 활용하는 것이다.
함수 $f: R^2 \rightarrow R^2$의 partial derivative를 구할 것이다. coordinate를 살펴보면, 다음과 같은 관계를 구할 수 있다.
(b1,b2)→(c1,c2)
y1=−2x1+x2y2=x1+x2
이런 관계로 partial derivative를 구해보면 아래와 같다.
∂x1∂y1=−2,∂x2∂y1=1,∂x1∂y2=1,∂x2∂y2=1
그리고 이를 바탕으로 jacobian을 구성해보면,
J=[∂x1∂y1∂x1∂y2∂x2∂y1∂x2∂y2]=[−2111]
Geometric Interpretation of Jacobian
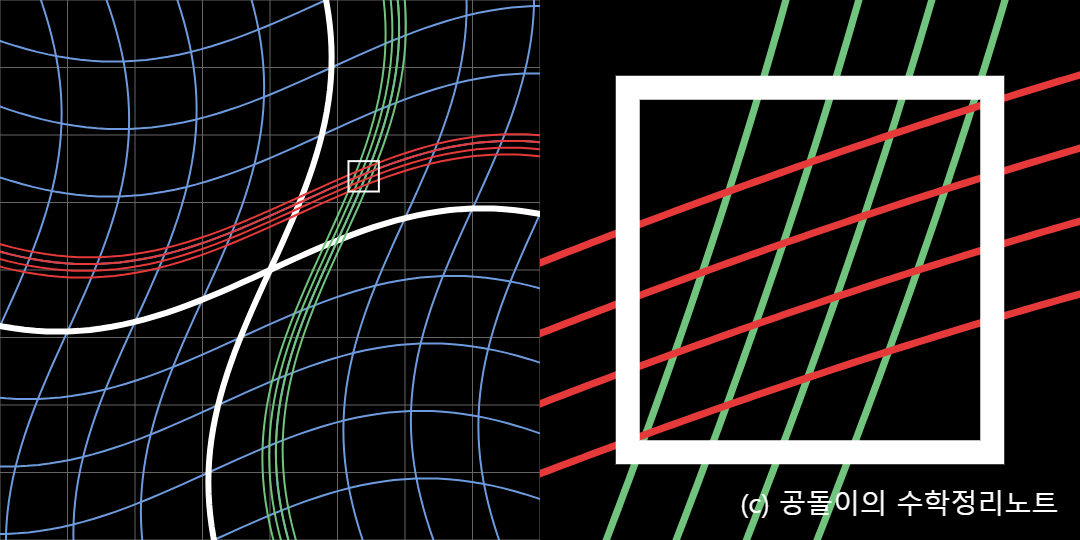
위의 이미지와 같이 non-linear transform이 있다고 했을 때, jacobian은 이를 linear하게 근사한 것이라고 볼 수 있다. 일반적으로 미분은 접선의 기울기라고 알려져 있는데, 이를 vector 공간에서 확장시키면 위의 이미지처럼, 나온다.
Reference
[1] 공돌이의 수학정리노트