Partial Differentiation and Gradients
Differentiation에서는 input $x \in R$는 scalar 값이었다. Partial Differentiation은 input $x \in R^n$이 vector 형태이며 앞의 differentiation보다 조금 더 일반화된 미분에 대해서 알아볼 것이다.
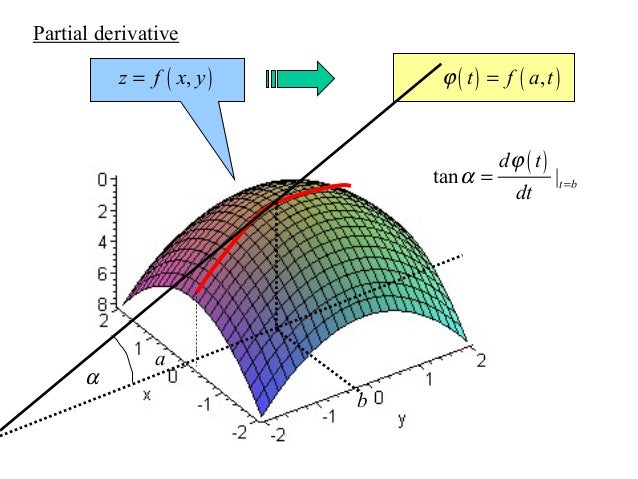
Definition 5.5: Partial Derivative
Function $f: R^n \rightarrow R$이 있다고 했을 때, partial derivertive는 다음과 같이 정의된다.
- $x \searrow f(x), x \in R^n$: n개의 variable, $x_1, \cdots, x_n$
∂x1∂f=h→0limhf(x1+h,x2,⋯,xn)−f(x)∂x2∂f=h→0limhf(x1,x2+h,⋯,xn)−f(x)...∂xn∂f=h→0limhf(x1,x2,⋯,xn+h)−f(x)
그리고, 위의 값들을 row vector의 형태로 모을 수 있다. 그리고 이 row vector를 jcobian 혹은 f의 gradient라고 한다.
∇xf=grad f=dxdf=[∂x1∂f(x),∂x2∂f(x),⋯,∂xn∂f(x)]
Remark
일반적으로 gradient는 column vector의 형태가 아닌 row vector의 형태로 나타낸다. 여기에는 두 가지 이유가 있는데 다음과 같다.
- $f: R^n \rightarrow R^m$의 함수꼴의 gradient를 구할 때 자연스럽게 matrix 형태의 jacobian이 나온다.
- multivariate chain rule을 적용할 때, 편리하다.
Basic Rules of Partial Differentiation
-
product rule
∂x∂(f(x)g(x))=∂x∂f(g(x))+∂x∂g(f(x))
-
sum rule
∂x∂(f(x)+g(x))=∂x∂f(x)+∂x∂g(x))
-
chain rule
∂x∂(g∘f(x))=∂x∂g(f(x))=∂x∂f(x)∂f(x)∂g(f(x))
Chain Rule
chain rule은 deep learning backpropagation 과정에서 핵심이 되는 부분이다. 이번 장에서는 조금 더 자세히 살펴보겠다.
- $f: R^2 \rightarrow R$: two variable $x_1, x_2$
- $x_1(t), x_2(t)$: $x_1, x_2$도 t에 대한 함수이다.
dtdf=[∂x1∂f,∂x2∂f][∂t∂x1∂t∂x2]=∂x1∂f∂t∂x1+∂x2∂f∂t∂x2
그렇다면, 이제 다음과 같은 수식으로 확장해보자.
- $x_1(s, t), x_2(s, t)$: $x_1, x_2$도 s, t에 대한 함수이다.
각 s, t에 대해서 partial derivative를 구하게 되면 아래와 같다.
dtdf=∂x1∂f∂t∂x1+∂x2∂f∂t∂x2dsdf=∂x1∂f∂t∂x1+∂x2∂f∂s∂x2
그리고 이를 matrix 형태로 나타내면 아래와 같다.
d(s,t)df=[∂x1∂f,∂x2∂f][∂s∂x1∂s∂x2∂t∂x1∂t∂x2]